Gradient Descent Code
All the code is written in matlab. Please visits here for a complete version of my code. The neural network code base is in reference to Dr. Chunming Wang's MATH467 project code.
Fixed Gradient Descent Implementation
function fixed_GD()
function[mse] = meanSquaredError(y, y_pred)
diff = (y - y_pred).^2;
mse = mean(diff, "all");
end
nTrials = 500;
fixed_step_size = 0.01;
epsilon = 1e-3; % minmal convergence error
[xData,yData]=getData(100,2,2338580531);
[network]=createNetwork(2,[3,3,1]);
[Weight]=getNNWeight(network);
Weight=randn(size(Weight));
RMS=NaN(nTrials,1);
[network]=setNNWeight(network,Weight);
prev_yVal = 1;
convergence = -1;
runOnce = 1;
for iTrial=1:nTrials
[yVal,yintVal]=networkFProp(xData,network);
[yGrad,~]=networkBProp(network,yintVal);
f = NaN(1,25);
for i=1:size(Weight,1)
f(i) = -2 .* dot(squeeze(yData-yVal), squeeze(yGrad(:, i, :)));
end
Weight = Weight - fixed_step_size .* f;
[network]=setNNWeight(network, Weight);
RMS(iTrial)=meanSquaredError(yData, yVal);
if (all(abs(yVal - prev_yVal) < epsilon) && runOnce == 1)
convergence = iTrial;
runOnce = 0;
end
prev_yVal = yVal;
end
disp(['it converges in ' num2str(convergence) ' iterations.']);
figure;
plot(RMS);
min(RMS)
return
end
Result
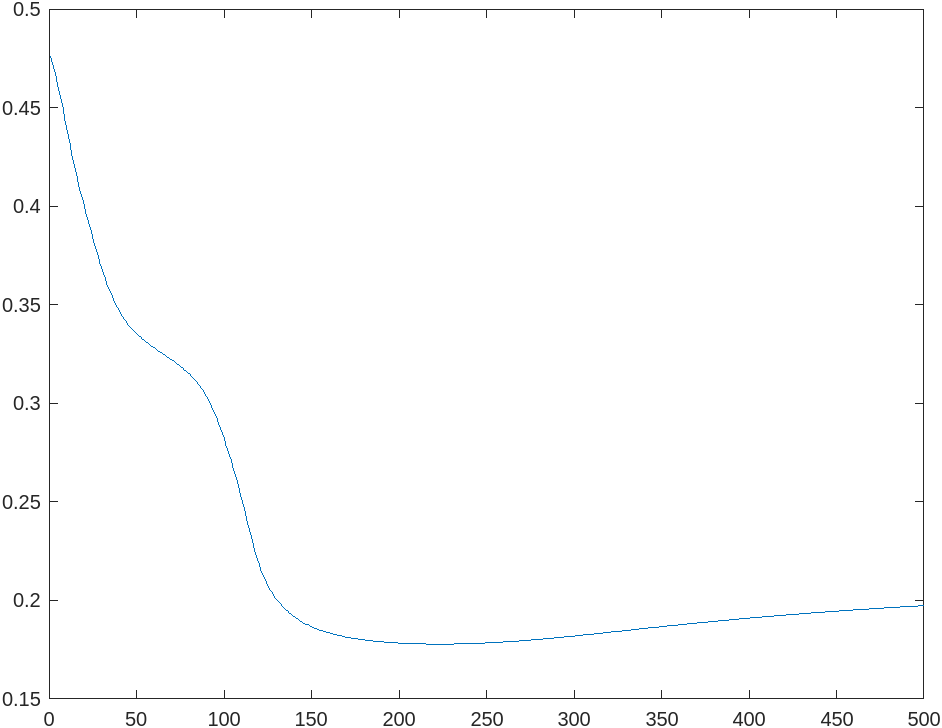
it converges in 306 iterations.
ans =
0.1778
Analysis
In the code, I use a fixed step size of , epoch of , batch size of , convergence error of , and a neural network of structure .
Turns out that it takes 306 iterations to converge to a root mean squared error of approximately 0.1778.
Steepest Gradiant Descent
function steepest_GD()
function[mse] = meanSquaredError(y, y_pred)
diff = (y - y_pred).^2;
mse = mean(diff, "all");
end
nTrials = 100;
steepest_step_size = 1; % start point for minimizing
epsilon = 1e-5; % minmal convergence error
[xData,yData]=getData(100,2,2338580531);
[network]=createNetwork(2,[3,3,1]);
[Weight]=getNNWeight(network);
Weight=randn(size(Weight));
RMS=NaN(nTrials,1);
[network]=setNNWeight(network,Weight);
prev_yVal = 1;
convergence = -1;
runOnce = 1;
for iTrial=1:nTrials
[yVal,yintVal]=networkFProp(xData,network);
[yGrad,~]=networkBProp(network,yintVal);
f = NaN(1,25);
for i=1:size(Weight,1)
f(i) = -2 .* dot(squeeze(yData-yVal), squeeze(yGrad(:, i, :)));
end
fun = @(a) meanSquaredError(yData, networkFProp(xData, setNNWeight(network, Weight - a .* f)));
steepest_step_size = fminsearch(fun, steepest_step_size);
Weight = Weight - steepest_step_size .* f;
[network]=setNNWeight(network, Weight);
RMS(iTrial)=meanSquaredError(yData, yVal);
if (all(abs(yVal - prev_yVal) < epsilon) && runOnce == 1)
convergence = iTrial;
runOnce = 0;
end
prev_yVal = yVal;
end
disp(['it converges in ' num2str(convergence) ' iterations.']);
figure;
plot(RMS);
min(RMS)
return
end
Result
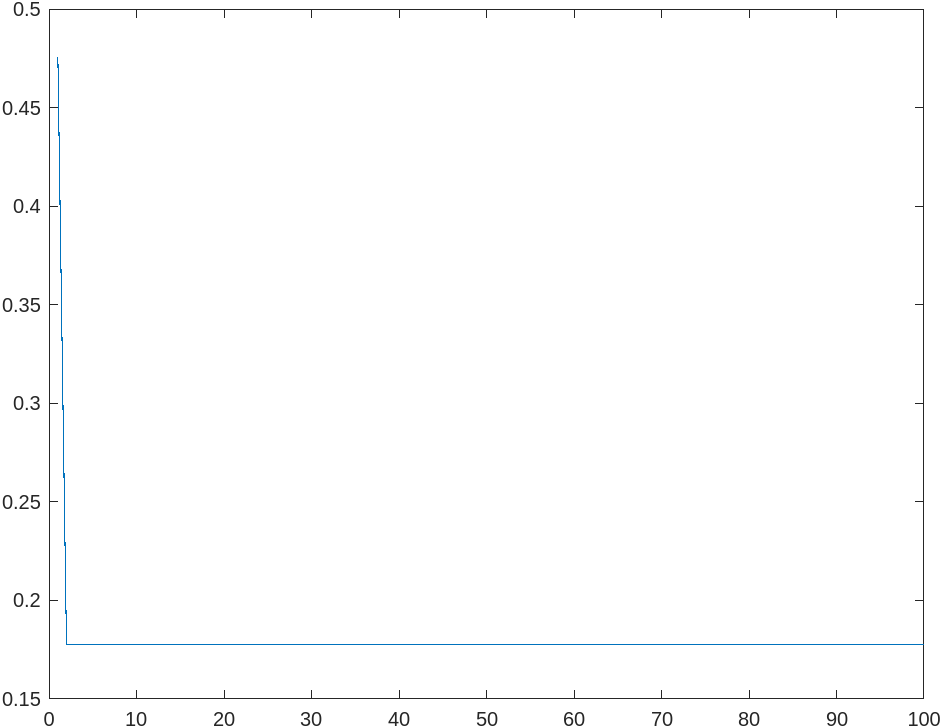
it converges in 3 iterations.
ans =
0.1778
Analysis
In the code, I use a epoch of , batch size of , convergence error of , and a neural network of structure .
Turns out that it takes 3 iterations to converge to a root mean squared error of approximately 0.1778. As we can see here, the steepest gradiant method converges much faster than the fixed step size gradiant method.
Conjugate Gradiant Descent
function conjugate_GD()
function[mse] = meanSquaredError(y, y_pred)
diff = (y - y_pred).^2;
mse = mean(diff, "all");
end
nTrials = 100;
conjugate_step_size = 1; % start point for minimizing
epsilon = 1e-5; % minmal convergence error
[xData,yData]=getData(100,2,2338580531);
[network]=createNetwork(2,[3,3,1]);
[Weight]=getNNWeight(network);
Weight=randn(size(Weight));
RMS=NaN(nTrials,1);
[network]=setNNWeight(network,Weight);
prev_yVal = 1;
convergence = -1;
runOnce = 1;
[yVal,yintVal]=networkFProp(xData,network);
[yGrad,~]=networkBProp(network,yintVal);
g = NaN(1,25);
for i=1:size(Weight,1)
g(i) = -2 .* dot(squeeze(yData-yVal), squeeze(yGrad(:, i, :)));
end
d = -1 .* g;
RMS(1)=meanSquaredError(yData, yVal);
for iTrial=2:nTrials
fun = @(a) meanSquaredError(yData, networkFProp(xData, setNNWeight(network, Weight + a .* d)));
conjugate_step_size = fminsearch(fun, conjugate_step_size);
% update weight
Weight = Weight + conjugate_step_size .* d;
[network]=setNNWeight(network, Weight);
% evaluate gradient for the next iteration
[yVal,yintVal]=networkFProp(xData,network);
[yGrad,~]=networkBProp(network,yintVal);
next_g = NaN(1, 25);
for i=1:size(Weight,1)
next_g(i) = -2 .* dot(squeeze(yData-yVal), squeeze(yGrad(:, i, :)));
end
% calculate beta using the Fletcher–Reeves method
beta = dot(transpose(next_g), next_g) ./ dot(transpose(g), g);
d = -1 .* next_g + beta .* d;
RMS(iTrial)=meanSquaredError(yData, yVal);
g = next_g;
if (all(abs(yVal - prev_yVal) < epsilon) && runOnce == 1)
convergence = iTrial;
runOnce = 0;
end
prev_yVal = yVal;
end
disp(['it converges in ' num2str(convergence) ' iterations.']);
figure;
plot(RMS);
min(RMS)
return
end
Result
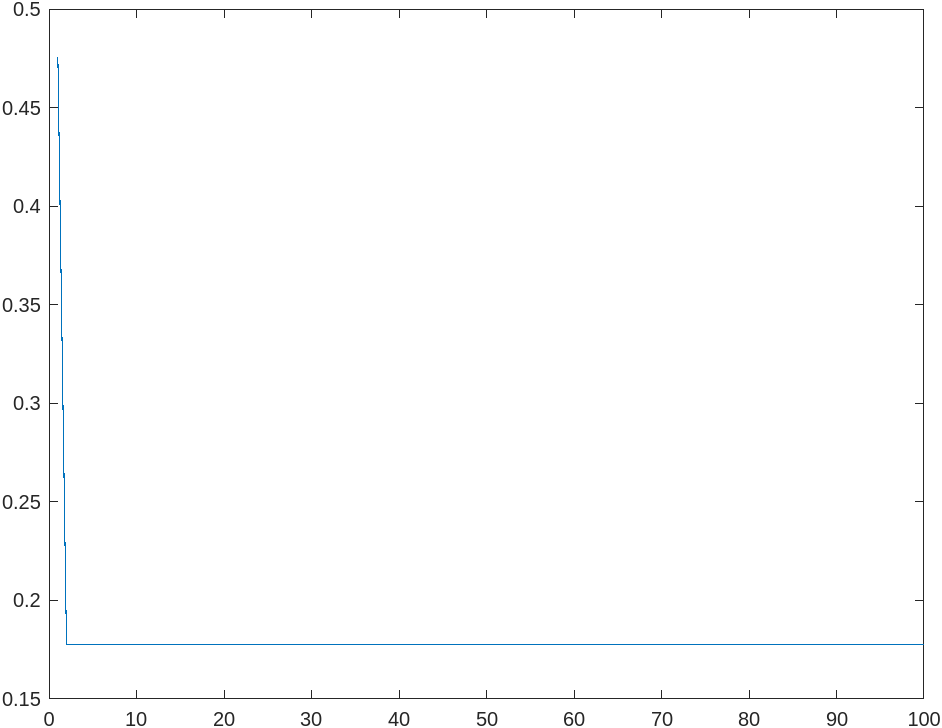
it converges in 3 iterations.
ans =
0.1778
Analysis
In the code, I use a epoch of , batch size of , convergence error of , and a neural network of structure .
Turns out that it takes 3 iterations to converge to a root mean squared error of approximately 0.1778. As we can see here, the conjugate gradiant method performs about the same as does the steepest descent method.
Topic of Exploration
I will choose to explore the topic of:
Convergence of the algorithm for different selection of step-sizes for fixed step-size method.
Result
I will choose four different fix step sizes to explore: with an epoch of . means the minimum error between trials for the algorithm to be considered converged.
| Step Size | Trials to Converge | |
|---|---|---|
| 1 | 0.0001 | 129 |
| 0.1 | 0.0001 | 268 |
| 0.01 | 0.0001 | 702 |
| 0.001 | 0.0001 | 3042 |
Analysis
We can see here, as we decrease the step size by , trials to converge increase by approximately . It makes sense that when we take smaller steps, the iteration it takes to reach the goal will be greater.